使用库函数配置 STM32F103C8T6 最小系统板 PC13 端口 实现板载 LED 灯闪烁
承 配置 STM32F103C8T6 最小系统板 PC13 寄存器点亮板载 LED 灯,本笔记通过库函数配置 PC13 引脚,控制其交替输出高低电平实现控制 LED 灯闪烁,用来复习库函数的基本使用。
参考自:STM32入门教程-2023持续更新中_哔哩哔哩_bilibili
目标
添加所需文件到工程
新建 Libraries 文件夹, 添加所需文件
Keil5/本地 新建 Libraries 文件夹,添加官方库的下述路径文件到其中:
\Libraries\STM32F10x_StdPeriph_Driver\inc- 所有文件
\Libraries\STM32F10x_StdPeriph_Driver\src- 所有文件
新建 System 文件夹,添加 Delay.h 和 Delay.c
我是用的 江协科技 提供的 Delay.h 和 Delay.c。
Delay.h
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endifDelay.c
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}向 User 文件夹添加所需文件
添加官方库的下述路径文件到 User 文件夹中:
\Project\STM32F10x_StdPeriph_Templatestm32f10x_conf.hstm32f10x_it.cstm32f10x_it.h
Keil5中 将不常修改的目录上移
一般情况下我们只需要修改 User 文件夹下的文件,Startup、Libraries 里的内容并不需要修改。
点击三个箱子的按钮 (File Extensions, Books and Environment...)

可以调整文件夹的排列顺序。
把这些不用修改的组靠上放置,会看着舒服一些。
宏定义 USE_STDPERIPH_DRIVER
右击
#include "stm32f10x.h"这一行,点击 Open document 'stm32f10x.h',可以打开 stm32f10x.h。
在 stm32f10x.h 临近末尾的位置,可以看到有这样的宏 条件编译:
#ifdef USE_STDPERIPH_DRIVER
#include "stm32f10x_conf.h"
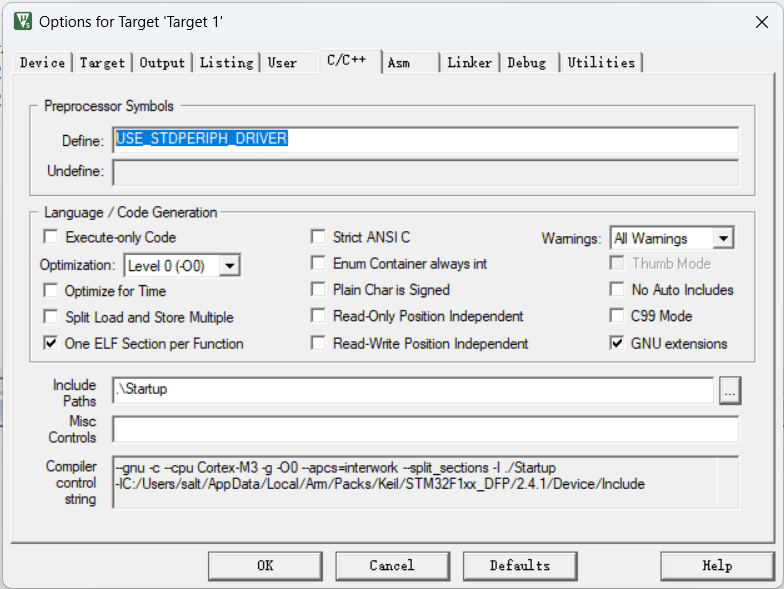
#endif点击魔术棒按钮 (Options for Target)

在 C/C++ - Preprocessor Symbols - Define 填入 USE_STDPERIPH_DRIVER
宏定义的好处
对于上述过程,也可以直接在 main.c 中插入 #include "stm32f10x_conf.h",不过使用宏定义的方式好处多一些。
宏定义是在程序中预先定义的一些宏指令或宏函数,可以用来简化复杂逻辑、重复性代码的编写。在编译时,预处理器将宏定义替换为相应的代码或表达式,从而使程序更加高效、易于维护和修改。
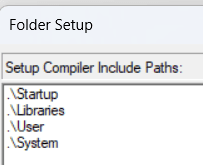
这里顺便在 Include Pahts 里加上 .\Libraries、.\User、.\System。
至此,基于库函数的工程就建好了,编译一下试试。
Build started: Project: Project
*** Using Compiler 'V5.06 update 6 (build 750)', folder: 'E:\Program Files\Keil_v5\ARM\ARMCC\Bin'
Build target 'Target 1'
linking...
Program Size: Code=700 RO-data=252 RW-data=0 ZI-data=1632
FromELF: creating hex file...
".\Objects\Project.axf" - 0 Error(s), 0 Warning(s).
Build Time Elapsed: 00:00:00接下来要通过库函数配置 PC13 引脚的高低电平交替输出,步骤:
- 使能 GPIOC 时钟
- 配置 PC13 引脚输出模式
- 设置 PC13 引脚高低电平交替输出
使能 GPIOC 时钟
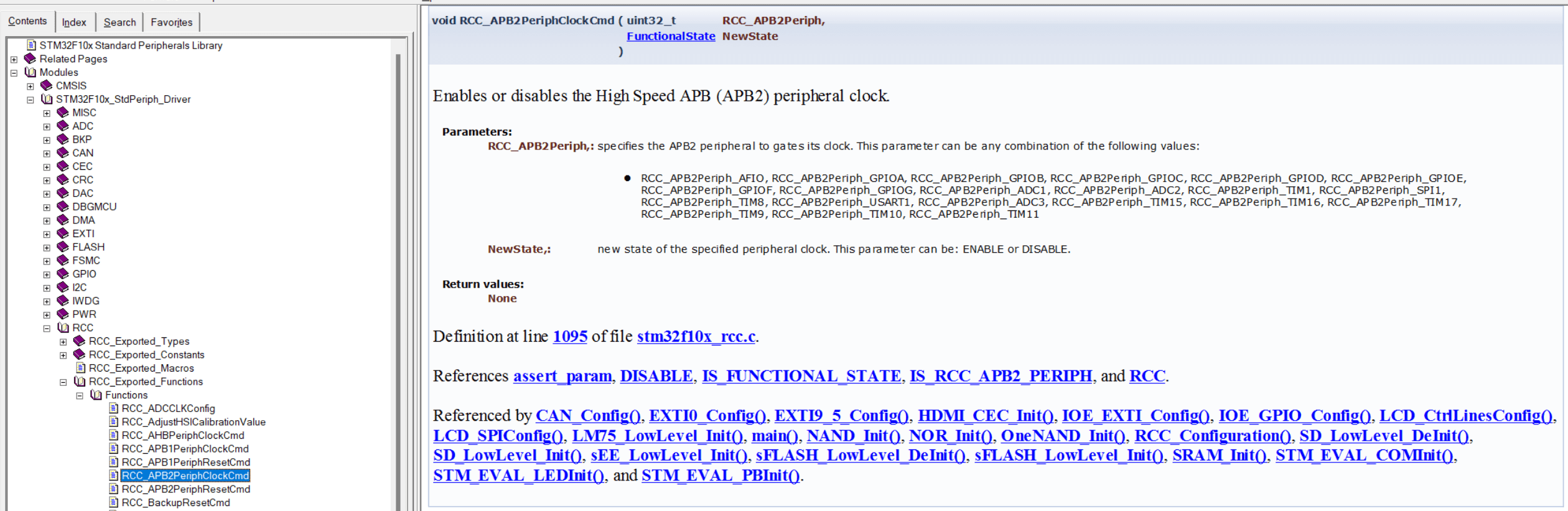
使能时钟函数是 RCC_APB2PeriphClockCmd,右键 - 点击 Go To Definition Of 'RCC_APB2PeriphClockCmd' 可以看到它的用法。
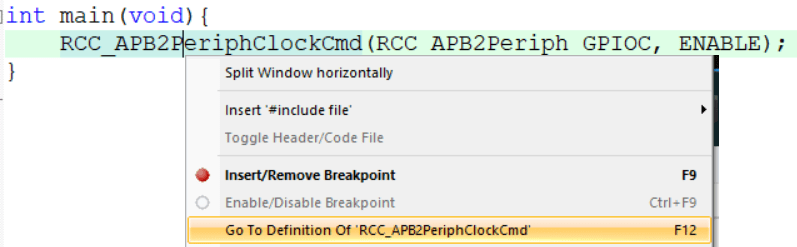
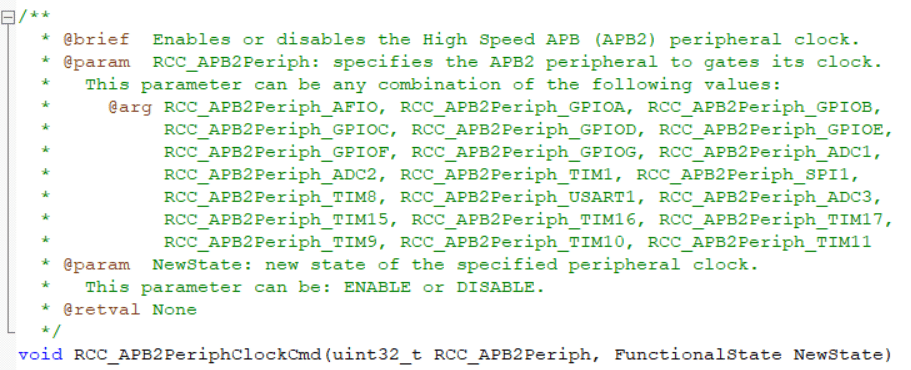
所以 RCC_APB2PeriphClockCmd 的配置为:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);通过 stm32f10x_stdperiph_lib_um.chm 查询库函数
在官方固件库的 stm32f10x_stdperiph_lib_um.chm 文件中也可以查到标准外设固件库函数列表及用法,这里标示得更清晰一些。
配置 PC13 引脚输出模式
配置引脚输出模式的函数是 GPIO_Init,用法:
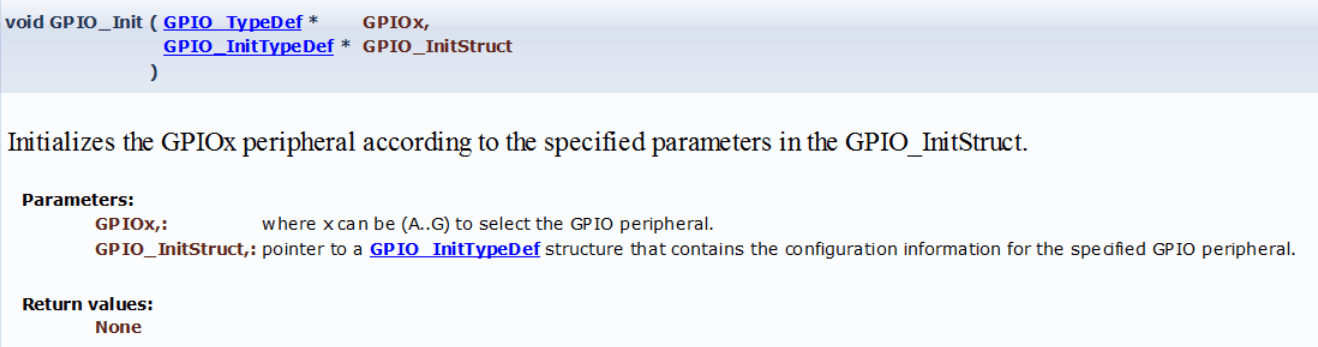
GPIO_InitStruct 这个参数需要自己定义一个 GPIO_InitTypeDef 类型的结构体。其名字随便起,但根据官方推荐,起为 GPIO_InitStructure 比较好。
GPIO_InitTypeDef 结构体有三个参数,分别是 GPIO_Mode、GPIO_Pin 和 GPIO_Speed:
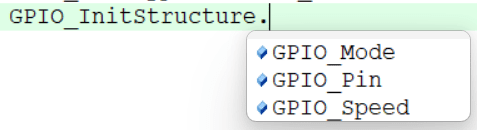
分别 Go To Definition 进行查询,得到配置:
GPIO_Mode:GPIO_Mode_Out_PPGPIO_Pin:GPIO_Pin_13GPIO_Speed:GPIO_Speed_50MHz
所以 GPIO_Init 的配置为
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);设置 PC13 引脚高低电平交替输出
使用 GPIO_ResetBits 和 GPIO_SetBits 来设置 PC13 的高低电平;
使用 Delay_ms 实现延时。
#include "Delay.h"
while(1){
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
Delay_ms(200);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
Delay_ms(200);
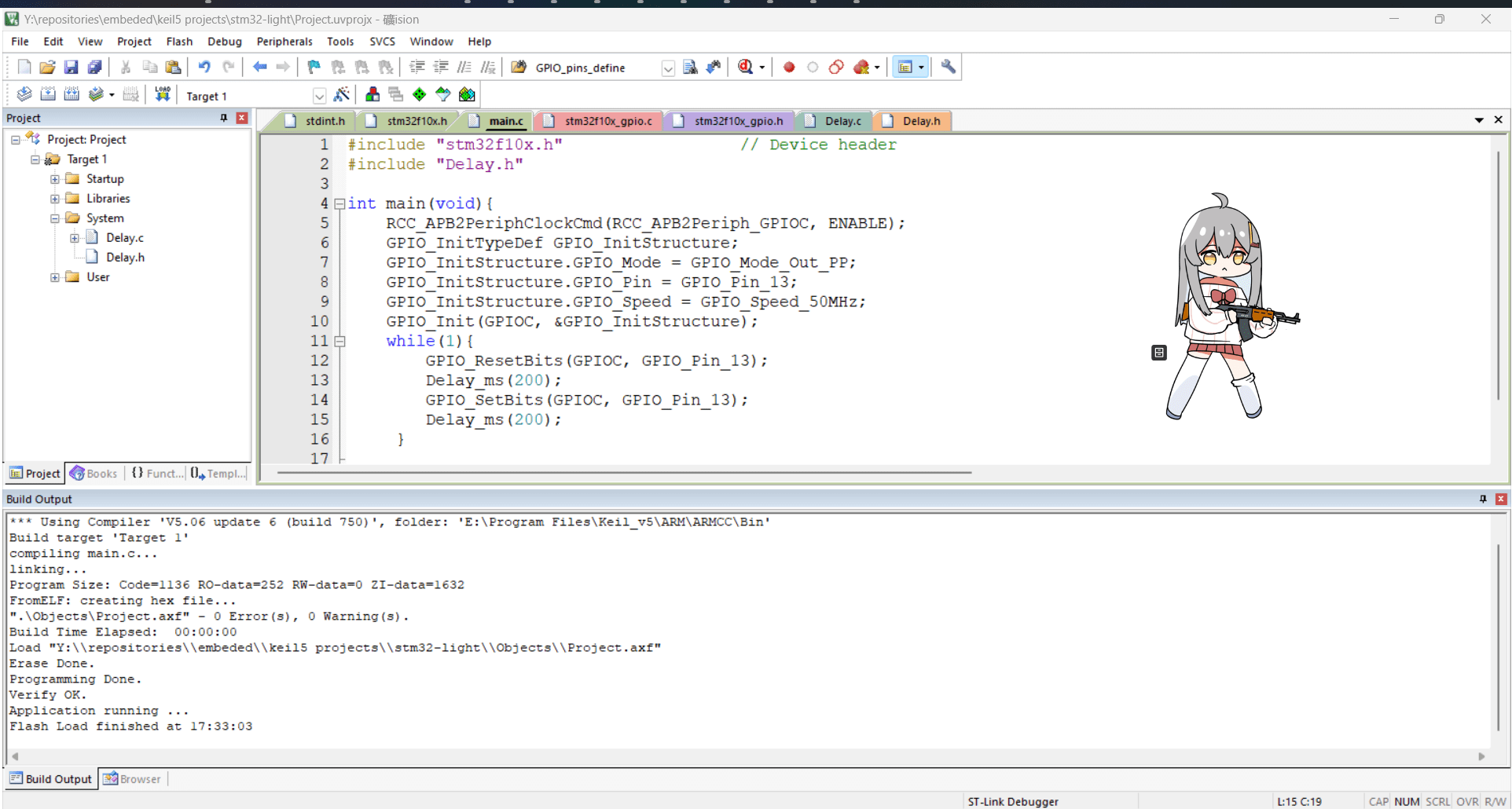
}完整的 main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
while(1){
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
Delay_ms(200);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
Delay_ms(200);
}
}